


























U9 2-6S 25V 600W Unterwasserstrahlruder/Propeller/Propeller mit integrierter ESC-Steuerung für ROV/Schiff/Roboter/Trawler/unbemanntes Schiff
Über Punkte (untere rechte Ecke der Store-Seite):
★Verdienen Sie 5 Punkte für jeden ausgegebenen Dollar;
★Verdienen Sie 1,00 $ Rabatt auf Ihre gesamte Bestellung für jeweils 100 eingelöste Punkte;
Gilt für Bestellungen beliebiger Höhe.
So verwenden Sie Punkte:
1. Lösen Sie Punkte im Smile-Panel ein.
2. Lösen Sie Punkte an der Kasse ein.
Wir sind die Quellfabrik. Bitte kontaktieren Sie uns unter lynn@underwaterthruster.com für Großeinkäufe/Anpassungen.
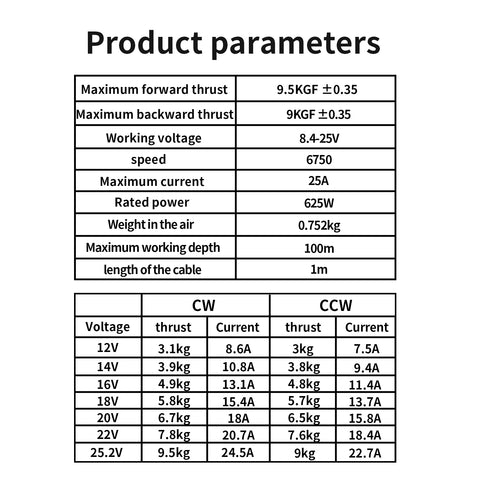
Das Unterwasserstrahlruder U9 2-6S 25V 600W verfügt über einen integrierten Regler.
U9-Nutzungsumgebung: Meerwasser/Süßwasser
Unterwasserantrieb CW und CCW Beschreibung:
Pulsweitenmodulation
Der vollständige Name von PWM lautet (Pulsweitenmodulation). Es wird auch als Tastverhältnissignal bezeichnet, das den Anteil der Dauer des hohen Pegels an der gesamten Signalperiode darstellt. Der volle PWM-Zyklus beträgt 2 ms, Stopp 1,5 ms, Vorwärts 1,5–2 ms und Rückwärts 1,5–1 ms.
Aus der Abbildung können wir deutlich erkennen, dass der Motor bei einer PWM von 75 % (1,5 ms) aufhört zu rotieren, bei einer PWM von 50 % (1 ms) in die umgekehrte Richtung dreht und bei einer PWM von 100 % ( Nach ca. 2 ms hört der Motor auf zu rotieren. Der Motor dreht sich vorwärts. Natürlich kann ESC nicht nur den Motor vorwärts und rückwärts drehen lassen, sondern auch die Drehzahl des Motors über den PWM-Arbeitszyklus anpassen. Wenn sich die PWM allmählich von 75 % auf 50 % ändert, fährt der Motor mit der Rückwärtsbeschleunigung vom Stopp fort, bis die Rückwärtsdrehung den Maximalwert erreicht. Wenn sich die PWM allmählich von 75 % auf 100 % ändert, beschleunigt der Motor vom Stopp zur Vorwärtsdrehung, bis die Vorwärtsdrehung den Maximalwert erreicht. Mit anderen Worten: PWM ist ein Signal, das sich kontinuierlich ändern kann, mit einem effektiven Bereich von 50 % bis 100 %.
Die Frequenz des PWM-Signals beträgt 50 Hz, 100 Hz, 200 Hz oder 500 Hz usw. Je höher die Steuerfrequenz, desto kürzer der Zyklus, desto kürzer das Steuerintervall, desto schneller reagieren Regler und Motor und desto schneller reagieren Regler und Motor. Im Gegenteil: Je niedriger die Steuerfrequenz, desto länger die Periode, desto länger das Steuerintervall und desto langsamer reagieren Geschwindigkeitsregler und Motor.
Häufig gestellte Fragen:
Über Anpassung
Zu den kundenspezifischen Dienstleistungen gehören: individuelle Anpassung von Triebwerken, Motoren und Reglern in allen Aspekten;
Wenn Sie Anpassungswünsche haben, wenden Sie sich bitte an APISQUEEN (lynn@underwaterthruster.com).
Über Tarife
In den Produktpreisen und Versandkosten sind keine Zölle enthalten, die in jedem Land unterschiedlich berechnet werden, wenn sie die Waren erhalten (z. B. die regionale Zollrichtlinie der USA: keine Zölle für Bestellungen bis zu 800 US-Dollar).
1. Internationale Importe aus einigen Ländern/Regionen erfordern möglicherweise die Zollabfertigung bestimmter Materialien (bei Bedarf stellen wir Kunden eine Proforma-Rechnung aus).
2. Erfolgt eine Rücksendung der Ware aufgrund mangelnder Mitwirkung des Kunden bei der Zollabwicklung, gehen die Frachtkosten zu Lasten des Empfängers.
3. Wir können Verbrauchslisten und Zertifikate zur Verfügung stellen. Bitte kontaktieren Sie uns, wenn dies vom Zoll verlangt wird.
4. Wenn das Produkt aus Gründen des Käufers zurückgegeben wird, trägt der Käufer die Versandkosten, und die Kosten hängen von der gewählten Expresszustellung ab. Sollte die Ware durch unser Verschulden beschädigt oder falsch sein, trägt APISQUEEN sämtliche Kosten.
5. Der Wert des Produkts, den wir beim Zoll anmelden, beträgt 10 % des tatsächlich vom Käufer bezahlten Bestellbetrags, sodass der Käufer im Allgemeinen nur sehr wenig Zollgebühren zahlt.
Über die Lieferung
Wir können in fast jedes Land der Welt versenden! Allerdings gibt es in einigen Ländern Einfuhrbeschränkungen, die beachtet werden müssen.
Wenn die Ware vorrätig ist: wird sie innerhalb von 1-3 Werktagen nach Zahlungseingang des Käufers versandt.
Falls kein Lagerbestand vorhanden ist: Die Ware wird innerhalb von 3–20 Werktagen nach Zahlungseingang des Käufers versendet.
1. Es kann andere Probleme geben, die zu einer verzögerten Lieferung führen, z. B. Adressinformationen, die einer weiteren Überprüfung bedürfen usw. Sie können jedoch sicher sein, dass wir uns rechtzeitig darum kümmern, um die Waren schneller versenden zu können.
2. Der Warentransport erfolgt im Allgemeinen je nach Standort des Käufers auf unterschiedliche Weise. Im Allgemeinen nutzen wir DHL, FedEx, UPS, Standleitungen usw.
3. Die Standard-Express-Lieferzeit an den Bestimmungsort beträgt im Allgemeinen 3–12 Tage (ohne andere besondere Umstände), und die Lieferzeit in abgelegene Länder/Regionen beträgt im Allgemeinen 10–20 Tage. Wenn Sie andere Anforderungen haben (z. B. Expressversand, Zollwerterklärung usw.), kontaktieren Sie uns bitte nach der Bestellung, um sicherzustellen, dass wir Ihre Anforderungen erfüllen können.
4. APISQUEEN legt die Versandkosten je nach Land/Region fest. Um die Einkaufskosten der Käufer zu senken, ergreift APISQUEEN die Initiative, 50 % der Versandkosten für Käufer zu übernehmen.
5. Die Transportgebühr wird nach dem Gewicht der Ware berechnet und bei Auftragserteilung abgerechnet. Die in der Abrechnung ausgewiesene Fracht ergibt sich zu 50 % aus der Verantwortung von APISQUEEN.
6. Sie können die Versandkosten wie folgt schätzen: Wählen Sie den Artikel aus, den Sie kaufen möchten → In den Warenkorb legen → Geben Sie die Postleitzahl der Lieferadresse ein → Wählen Sie die Versandart → Dann erhalten Sie die geschätzten Versandkosten.
7. Wenn Sie das Produkt dringend benötigen, kontaktieren Sie uns bitte vor der Bestellung, um sicherzustellen, dass wir Ihren Zeitbedarf erfüllen können.
Über After-Sales
1. Bestellungen können vor dem Versand des Produkts storniert werden, um eine vollständige Rückerstattung (einschließlich Versandkosten) zu erhalten. Wenn der Käufer nach dem Versand der Ware aus eigenen Gründen eine Rückerstattung verlangt (z. B. weil er die Ware nicht möchte, das falsche Produkt gekauft hat usw.), muss der Käufer die Kosten für die Expresslieferung tragen und die Ware zurücksenden Anschließend erhalten wir die zurückgesendete Ware zurück.
2. Wenn Sie feststellen, dass Ihr Paket während des Transports beschädigt ist, kontaktieren Sie uns bitte (Lynn@underwaterthruster.com) innerhalb von 5 Tagen nach Erhalt der Ware und stellen Sie Fotos oder Videos der Ware zur Verfügung. Wir werden innerhalb von 1-3 Tagen antworten es für Sie innerhalb von Werktagen entsprechend der tatsächlichen Situation zu Ihrer Zufriedenheit.
3. Wenn Sie Ihre gekaufte Ware nach Erhalt der Ware umtauschen müssen, müssen Sie die Ware innerhalb von 6 Monaten nach dem Kauf des Produkts und der Empfangsbestätigung an APISQUEEN senden. Sollten Qualitätsprobleme mit dem Produkt auftreten, stellen wir Ihnen die Ware kostenlos zur Verfügung -Verkaufsservice und kostenloser Ersatz für den Käufer. Schicken Sie neues Zubehör oder neue Produkte zu Ihnen nach Hause (Käufer müssen nur die Versandkosten für den Expressversand tragen. APISQUEEN übernimmt nicht mehr 50 % der Versandkosten für Käufer, verlangt jedoch von Käufern). übernehmen 100 % der Versandkosten)
APISQUEEN verweigert den Kundendienst unter folgenden Umständen:
1. Ausfälle und Schäden, die nicht auf Produktqualitätsprobleme zurückzuführen sind.
2. Schäden, die durch Schaltungsänderungen oder unsachgemäße Anpassung verursacht wurden.
3. Schäden, die durch unbefugte Modifikation oder Demontage verursacht wurden.
4. Schäden, die durch unsachgemäße Installation oder Verwendung verursacht wurden.
5. Wenn Sie nach der Verwendung im Meerwasser nicht rechtzeitig mit Süßwasser reinigen, verkürzt sich die Lebensdauer des Produkts.