


























U9 2-6S 25V 600W vedenalainen potkuri/potkuri/potkuri sisäänrakennetulla ESC-säätimellä integroitu ROV/laiva/robotti/troolari/miehittämätön alus
Tietoja pisteistä (kauppasivun oikea alakulma):
★ Ansaitse 5 pistettä jokaisesta käytetystä US$:sta;
★ Jokaista 100 lunastettua pistettä kohti voit ansaita US$1,00 koko tilauksesta.
Koskee minkä tahansa summan tilauksia.
Kuinka käyttää pisteitä:
1. Lunasta pisteitä Smile Boardilla.
2. Lunasta pisteitä kassalla.
Olemme lähdetehdas, ota meihin yhteyttä irtotavarakauppaa/räätälöintiä varten: lynn@underwaterthruster.com.
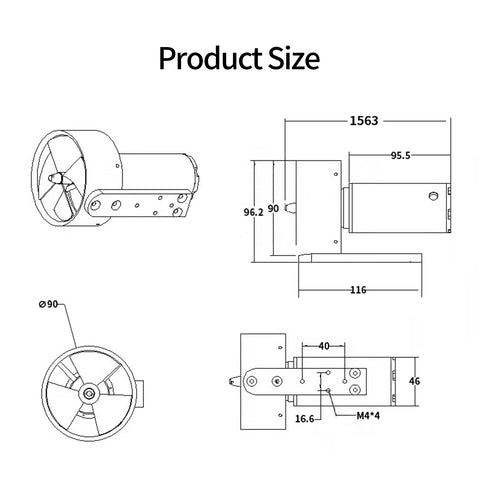
U9 2-6S 25V 600W vedenalainen potkuri sisäänrakennetulla ESC:llä.
U9 käyttöympäristö: merivesi/makea vesi
Vedenalainen propulsio CW ja CCW Kuvaus
Tietoja PWM:stä
PWM:n koko nimi on (pulssinleveysmodulaatio). Kutsutaan myös käyttöjaksosignaaliksi, se edustaa korkean tason keston osuutta koko signaalijaksosta. Koko PWM-jakso on 2 ms, pysähtyen 1,5 ms:ssa, eteenpäin 1,5-2 ms:ssa ja taaksepäin 1,5-1 ms:ssa.
Kuvasta näkyy selvästi, että kun PWM on 75 % (1,5 ms), moottori lakkaa pyörimästä, kun PWM on 50 % (1 ms), moottori pyörii vastakkaiseen suuntaan ja kun PWM on 100 % ( 2 ms), moottori lakkaa pyörimästä. Tietenkin ESC ei voi vain saada moottoria pyörimään eteenpäin ja taaksepäin, vaan myös säätää moottorin nopeutta PWM-käyttöjakson kautta. Kun PWM muuttuu asteittain 75 %:sta 50 %:iin, moottori jatkaa peruuttamista ja kiihdyttää pysähdyksestä, kunnes peruutus saavuttaa maksimin. Kun PWM muuttuu asteittain 75 %:sta 100 %:iin, moottori jatkaa kiihtymistä pysäytyksestä eteenpäin pyörimiseen, kunnes eteenpäin pyöriminen saavuttaa maksimiarvon. Toisin sanoen PWM on signaali, joka voi muuttua jatkuvasti, ja tehollinen alue on 50% ~ 100%.
PWM-signaalin taajuus on 50hz, 100hz, 200hz tai 500hz jne. Mitä suurempi ohjaustaajuus, sitä lyhyempi jakso, sitä lyhyempi säätöväli ja sitä nopeampi ESC:n ja moottorin vastenopeus. Mitä nopeammin ESC ja moottori vastaavat. Päinvastoin, mitä pienempi ohjaustaajuus, sitä pidempi ajanjakso, sitä pidempi säätöväli ja sitä hitaampi ESC:n ja moottorin vaste.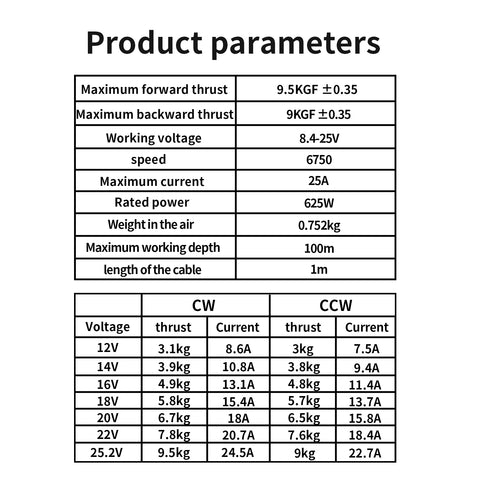
Usein Kysytyt Kysymykset:
Tietoja mukauttamisesta
Räätälöintipalveluihin kuuluvat: ohjauspotkurien, moottoreiden ja ESC:n räätälöinti kaikilta osin;
Jos sinulla on mukautustarpeita, ota yhteyttä APISQUEENiin (lynn@underwaterthruster.com).
Tietoja tariffeista
Tuotteiden hinnat ja toimituskulut eivät sisällä tariffeja, jotka veloitetaan eri maissa. Ostajien on maksettava tariffit vastaanottaessaan tavarat (esimerkiksi Yhdysvaltain alueellinen tariffipolitiikka: ei tariffeja 800 dollariin asti).
1. Kansainvälinen tuonti joistakin maista/alueilta saattaa edellyttää tiettyjen materiaalien tulliselvitystä (tarvittaessa toimitamme asiakkaille proforma-laskun).
2. Jos tavarat palautetaan, koska asiakas ei toimi yhteistyössä tullauksen kanssa, rahti jää vastaanottajalle.
3. Voimme toimittaa kulutusluettelot ja todistukset, jos tulli niin vaatii.
4. Jos tuote palautetaan ostajan syistä, ostaja maksaa lähetyskulut ja hinta riippuu valitusta pikatoimituksesta. Jos tavarat ovat vioittuneet tai väärät meidän syytämme, APISQUEEN vastaa kaikista kustannuksista.
5. Tullille ilmoittamamme tuotteen arvo on 10 % ostajan tosiasiallisesti maksamasta tilaussummasta, joten ostaja maksaa yleensä hyvin vähän tullia.
Tietoja toimituksesta
Voimme lähettää lähes mihin tahansa maailman maahan! Joissakin maissa on kuitenkin tuontirajoituksia, jotka on otettava huomioon.
Varastotilanteessa: tavarat lähetetään 1-3 arkipäivän kuluessa ostajan maksusta.
Jos varastossa ei ole: tavarat lähetetään 3-20 työpäivän kuluessa ostajan maksusta.
1. Saattaa olla muita ongelmia, jotka aiheuttavat viivästyneen toimituksen, kuten osoitetiedot, jotka tarvitsevat lisätarkistusta jne. Voit kuitenkin olla varma, että toimimme ajoissa toimittaaksemme tavarat nopeammin.
2. Tavarat kuljetetaan yleensä ilmateitse. Käytämme yleensä erilaisia kuljetustapoja ostajan sijainnin mukaan.
3. Tavallinen pikatoimitusaika kohteeseen on yleensä 3-12 päivää (ilman muita erityisolosuhteita), ja toimitusaika syrjäisille maille/alueille on yleensä 10-20 päivää. Jos sinulla on muita tarpeita (kuten nimetty pikatoimitus, tullausarvon ilmoitus jne.), ota meihin yhteyttä tilauksen tekemisen jälkeen varmistaaksemme, että voimme täyttää vaatimukset.
4. APISQUEEN asettaa toimitushinnat eri maiden/alueiden mukaan Vähentääkseen ostajien ostokustannuksia, APISQUEEN vastaa 50 % ostajien toimituskuluista.
5. Kuljetusmaksu veloitetaan tavaran painon mukaan ja maksetaan tilauksen yhteydessä. Selvityksen mukainen rahti on APISQUEENin 50 %:n tulos.
6. Voit arvioida toimituskulut seuraavasti: Valitse ostettava tuote → Lisää ostoskoriin → Syötä toimitusosoitteen postinumero → Valitse toimitustapa → sitten saat arvioidun toimituskulut.
7. Jos tarvitset tuotetta kiireellisesti, ota meihin yhteyttä ennen tilauksen tekemistä varmistaaksemme, että voimme täyttää aikatarpeesi.
Tietoja myynnin jälkeisestä myynnistä
1. Tilaukset voidaan peruuttaa ennen tuotteen lähettämistä saadakseen täyden hyvityksen (mukaan lukien toimituskulut). Tavaran lähetyksen jälkeen, jos ostaja pyytää hyvitystä omasta syystään (esimerkiksi: hän ei halua sitä, osti väärän tuotteen jne.), ostajan on vastattava pikatoimituksen kustannuksista ja palautettava tavara Vastaanotamme palautetut tuotteet ostajalle.
2. Jos huomaat, että pakettisi on vaurioitunut kuljetuksen aikana, ota meihin yhteyttä (Lynn@underwaterthruster.com) 5 päivän kuluessa tavaran vastaanottamisesta ja toimita kuvia tai videoita tavaroista. Vastaamme 1-3 päivän kuluessa se sinulle työpäivien kuluessa todellisen tilanteen mukaan tyydyttävästi.
3. Jos sinun on vaihdettava ostamasi tavarat tavaroiden vastaanottamisen jälkeen, sinun on postitettava tavarat APISQUEENille;
Jos tuotteessa ilmenee laatuongelmia 6 kuukauden kuluessa tuotteen ostamisesta ja kuitti on vahvistettu, tarjoamme ilmaisen myynnin jälkeisen palvelun ja postitamme uudet lisävarusteet tai uudet tuotteet ostajalle ilmaiseksi (ostajan tarvitsee vain maksaa pikakuljetuskustannukset), APISQUEEN ei enää auta ostajia maksamaan 50 % toimituskuluista ja vaatii ostajia maksamaan 100 % toimituskuluista)
APISQUEEN kieltäytyy huoltopalvelusta seuraavissa olosuhteissa:
1. Viat ja vahingot, jotka eivät ole aiheutuneet tuotteen laatuongelmista.
2. Piirin muutoksen tai väärän sovituksen aiheuttama vaurio.
3. Vahingot, jotka aiheutuvat luvattomasta muuttamisesta tai purkamisesta.
4. Väärän asennuksen tai käytön aiheuttamat vauriot.
5. Jos tuotetta ei puhdisteta makealla vedellä ajoissa merivedessä käytön jälkeen, tuotteen käyttöikä lyhenee.
Kaikkia tuotteita ei palauteta tai vaihdeta, ellei niissä ole laatuongelmia. Ostamalla tuotteitamme hyväksyt tämän käytännön.