




















APISQUEEN 2-6S 100A ESC (avec 5.5V 3A BEC) pour propulseurs et moteurs sous-marins
Tension d'alimentation : 2-6S
Courant continu : 100A
Mode de fonctionnement : bidirectionnel
BEC : 5.5V 3A
Imperméable à l'eau
Non étanche
Lien de téléchargement du logiciel (cliquez sur le lien pour télécharger) : https://cdn.shopifycdn.net/s/files/1/0621/5493/2452/files/ApisQueen_tool.zip?v=1677690776
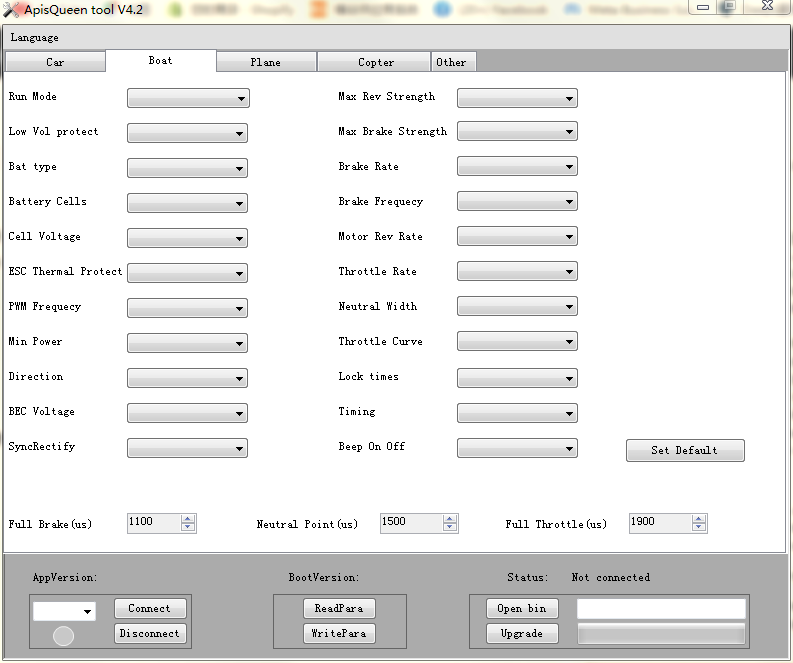
[Si vous ne trouvez pas le port com, vous devez télécharger et installer le pilote Ch340 ou Ch341. Utilisez Usb pour connecter l'ordinateur et le câble de signal ESC, cliquez sur Tools, sélectionnez com port, cliquez sur Connect, puis allumez l'ESC, assurez-vous que la connexion est réussie, puis Readpara pour lire les paramètres, puis modifiez les paramètres correspondants, puis cliquez writepara pour écrire et sauvegarder.
A propos du PWM
Le nom complet de PWM est Pulse Width Modulation (modulation de largeur d'impulsion). Il est également connu sous le nom de signal de rapport cyclique, qui indique la proportion de la durée du niveau haut par rapport à la période totale du signal. La période totale de MLI est de 2 ms, 1,5 ms d'arrêt, 1,5-2 ms de marche avant, 1,5-1 ms de marche arrière.
La figure montre clairement que lorsque le PWM est de 75 % (1,5 ms), le moteur s'arrête de tourner, lorsque le PWM est de 50 % (1 ms), le moteur tourne en sens inverse, et lorsque le PWM est de 100 % (2 ms), le moteur s'arrête de tourner. Bien entendu, l'ESC peut non seulement faire tourner le moteur en avant et en arrière, mais aussi ajuster la vitesse de rotation du moteur par la taille du rapport cyclique du PWM. Lorsque le PWM passe progressivement de 75 % à 50 %, le moteur continue d'inverser et d'accélérer à partir de l'arrêt jusqu'à ce que l'inversion atteigne le maximum. Lorsque le PWM passe progressivement de 75 % à 100 %, le moteur accélère de l'arrêt à la rotation avant jusqu'à ce que la rotation avant atteigne la valeur maximale. En d'autres termes, le MLI est un signal qui peut être modifié en continu avec une plage effective de 50 % à 100 %.
Plus la fréquence de contrôle est élevée, plus la période est courte, plus l'intervalle de contrôle est court, plus la vitesse de réponse de l'ESC et du moteur est élevée. Plus la fréquence de commande est élevée, plus la période est courte, plus l'intervalle de commande est court, plus la vitesse de réponse de l'ESC et du moteur est rapide. Inversement, plus la fréquence de commande est basse, plus la période est longue, plus l'intervalle de commande est long, plus l'ESC et la réponse du moteur sont lents.


Customer Reviews
Im using the thrusters as stern thrusters on my 18’ fishing boat. I use livescope and spot lock to hold over fish but the wind or currents blow the stern around.Now I can hold an exact spot and fish it all day without moving. Works Great!!

