


























Propulsore/elica/elica subacquea U9 2-6S 25V 600W con controllo ESC integrato integrato per ROV/nave/robot/peschereccio/nave senza equipaggio
Informazioni sui punti (angolo in basso a destra della pagina del negozio):
★Guadagna 5 punti per ogni $ 1 speso;
★ Guadagna $ 1,00 sull'intero ordine per ogni 100 punti riscattati;
Applicabile ad ordini di qualsiasi importo.
Come utilizzare i punti:
1. Riscatta sul pannello del sorriso.
2. Riscatta alla cassa.
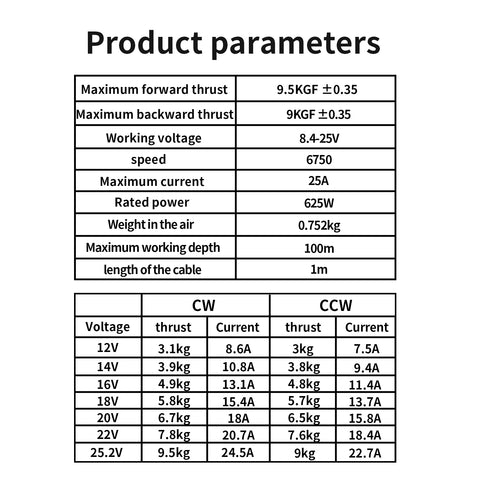
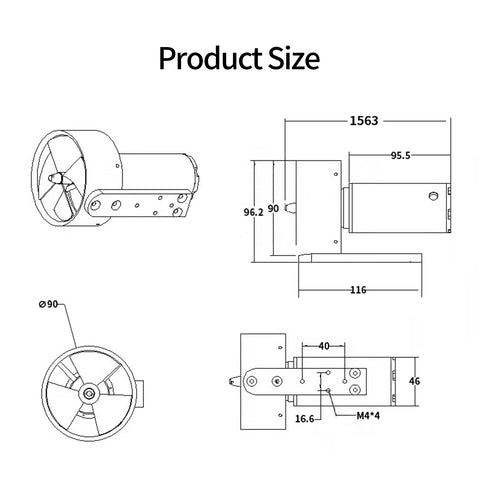
Propulsore subacqueo U9 2-6S 25V 600W con ESC integrato.
A proposito di PWM
Il nome completo del PWM è (modulazione dell'ampiezza dell'impulso). Chiamato anche segnale del ciclo di lavoro, rappresenta la proporzione della durata di alto livello rispetto all'intero ciclo del segnale. L'intero periodo PWM è di 2 ms, con arresto a 1,5 ms, avanzamento a 1,5-2 ms e inversione a 1,5-1 ms.
Possiamo vedere chiaramente dalla figura che quando il PWM è al 75% (1,5 ms), il motore smette di ruotare, quando il PWM è al 50% (1 ms), il motore ruota nella direzione opposta e quando il PWM è al 100% ( 2ms), il motore smette di ruotare. Naturalmente, l'ESC non solo può far ruotare il motore in avanti e all'indietro, ma anche regolare la velocità del motore attraverso il ciclo di lavoro PWM. Quando il PWM cambia gradualmente dal 75% al 50%, il motore continuerà a invertire e ad accelerare dall'arresto finché la retromarcia non raggiunge il massimo. Quando il PWM cambia gradualmente dal 75% al 100%, il motore continua ad accelerare dall'arresto alla rotazione in avanti finché la rotazione in avanti non raggiunge il valore massimo. Cioè, PWM è un segnale che può cambiare continuamente e la gamma effettiva è del 50% ~ 100%.
La frequenza del segnale PWM è 50 Hz, 100 Hz, 200 Hz o 500 Hz, ecc. Maggiore è la frequenza di controllo, più breve è il periodo, più breve è l'intervallo di controllo e maggiore è la velocità di risposta dell'ESC e del motore. Più velocemente rispondono l'ESC e il motore. Al contrario, più bassa è la frequenza di controllo, più lungo sarà il periodo, più lungo l'intervallo di controllo e più lenta la risposta dell'ESC e del motore.
Domande frequenti:
A proposito di personalizzazione
I servizi di personalizzazione includono: personalizzazione di propulsori, motori ed ESC in tutti gli aspetti;
Se hai esigenze di personalizzazione, contatta APISQUEEN (lynn@underwaterthruster.com).
A proposito di tariffe
I prezzi dei prodotti e le spese di spedizione non includono le tariffe, che vengono addebitate in modo diverso in ciascun Paese e gli acquirenti devono pagare le tariffe quando ricevono la merce (ad esempio, la politica tariffaria regionale degli Stati Uniti: nessuna tariffa per acquisti fino a $ 800).
1. Le importazioni internazionali da alcuni paesi/regioni potrebbero richiedere lo sdoganamento di materiali specifici (se necessario, forniremo ai clienti una fattura proforma).
2. Se la merce viene restituita perché il cliente non collabora allo sdoganamento, il trasporto sarà a carico del destinatario.
3. Possiamo fornire elenchi di consumo e certificati. Vi preghiamo di contattarci se richiesto dalla dogana.
4. Se il prodotto viene restituito per motivi dell'acquirente, l'acquirente sosterrà le spese di spedizione e il costo dipenderà dalla consegna espressa scelta. Se la merce è danneggiata o errata per colpa nostra, APISQUEEN si farà carico di tutti i costi.
5. Il valore del prodotto che dichiariamo alla dogana è pari al 10% dell'importo dell'ordine effettivamente pagato dall'acquirente, quindi l'acquirente generalmente paga pochissimi dazi doganali.
A proposito di consegna
Possiamo spedire in quasi tutti i paesi del mondo! Tuttavia, in alcuni paesi ci sono restrizioni all’importazione che devono essere prese in considerazione.
In caso di stock: la merce verrà spedita entro 1-3 giorni lavorativi dal pagamento da parte dell'acquirente.
In caso di esaurimento scorte: la merce verrà spedita entro 3-20 giorni lavorativi dal pagamento dell'acquirente.
Oppure potrebbero esserci altri problemi che ritardano la consegna, come informazioni sull'indirizzo che necessitano di ulteriore verifica, ecc. Ma ti assicuriamo che ti risponderemo in modo tempestivo in modo che la merce possa essere spedita più velocemente.
1. Le merci vengono generalmente trasportate per via aerea. Utilizziamo diversi metodi di trasporto a seconda della posizione dell'acquirente. Generalmente utilizziamo DHL, FedEx, UPS, linee dedicate, ecc.
2. Il tempo di consegna espresso standard alla destinazione è generalmente di 3-12 giorni (senza altre circostanze speciali) e il tempo di consegna in paesi/regioni remoti è generalmente di 10-20 giorni. Se hai altre esigenze (come consegna espressa designata, dichiarazione di valore in dogana, ecc.), ti preghiamo di contattarci dopo aver effettuato l'ordine per assicurarci di poter soddisfare le tue esigenze.
3. APISQUEEN stabilisce le tariffe di spedizione in base ai diversi paesi/regioni. Al fine di ridurre i costi di acquisto degli acquirenti, APISQUEEN prende l'iniziativa di sostenere il 50% delle spese di spedizione per gli acquirenti.
4. Le spese di trasporto vengono addebitate in base al peso della merce e vengono saldate al momento dell'ordine. Le spese di trasporto indicate nella liquidazione sono a carico di APISQUEEN al 50%.
5. Puoi stimare il costo di spedizione come segue: Seleziona l'articolo che desideri acquistare → Aggiungi al carrello → Inserisci il codice postale dell'indirizzo di spedizione → Seleziona il metodo di spedizione → Quindi riceverai il costo di spedizione stimato.
6. Se hai bisogno urgentemente del prodotto, ti preghiamo di contattarci prima di effettuare un ordine per assicurarci di poter soddisfare le tue esigenze di tempo.
Informazioni sul post-vendita
1. Gli ordini possono essere annullati prima che il prodotto venga spedito per ottenere un rimborso completo (comprese le spese di spedizione). Dopo la spedizione della merce, se l'acquirente richiede un rimborso per motivi personali (ad esempio: non lo vuole, ha acquistato il prodotto sbagliato, ecc.), l'acquirente dovrà sostenere il costo della consegna espressa e restituire la merce a noi riceveremo la merce restituita, verrà rimborsato l'acquirente.
2. Se ritieni che il pacco sia danneggiato durante il trasporto, contattaci (Lynn@underwaterthruster.com) entro 5 giorni dalla ricezione della merce e fornisci foto o video della merce. Risponderemo entro 1-3 giorni per te entro giorni lavorativi in base alla situazione reale in modo soddisfacente.
3. Se è necessario sostituire la merce acquistata dopo aver ricevuto la merce, è necessario spedire la merce a APISQUEEN entro 6 mesi dall'acquisto del prodotto e dalla conferma della ricezione, in caso di problemi di qualità con il prodotto, forniremo gratuitamente dopo -servizio di vendita e sostituzione gratuita per l'acquirente. Spedisci nuovi accessori o nuovi prodotti a casa tua (gli acquirenti devono sostenere solo le spese di spedizione della consegna espressa. APISQUEEN non sosterrà più il 50% delle spese di spedizione per gli acquirenti, ma richiede agli acquirenti di farlo sostenere il 100% delle spese di spedizione)
APISQUEEN rifiuta il servizio post-vendita nelle seguenti circostanze:
1. Guasti e danni non causati da problemi di qualità del prodotto.
2. Danni causati da modifiche al circuito o abbinamento improprio.
3. Danni causati da modifiche o disassemblaggi non autorizzati.
4. Danni causati da installazione o utilizzo impropri.
5. La mancata pulizia tempestiva con acqua dolce dopo l'uso in acqua di mare ridurrà la durata del prodotto.
Tutti i prodotti "non verranno restituiti o scambiati a meno che non vi siano problemi di qualità". Acquistando i nostri prodotti accetti questa politica.