


























U9 2-6S 25V 600W ใต้น้ำ Thruster/ใบพัด/ใบพัดในตัว ESC ควบคุมแบบบูรณาการสำหรับ ROV/เรือ/หุ่นยนต์/trawler/ไร้คนขับเรือ
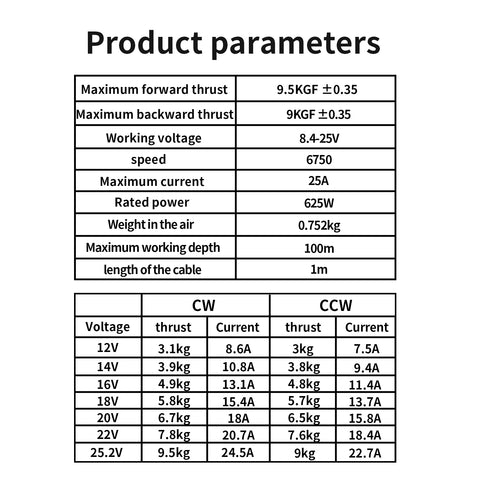
U9 2-6S 25V 600W ใต้น้ำ Thruster พร้อม ESC ในตัว
เกี่ยวกับพีเอ็มดับเบิลยู
ชื่อเต็มของ PWM คือ (การปรับความกว้างพัลส์) เรียกอีกอย่างว่าสัญญาณรอบหน้าที่ ซึ่งแสดงถึงสัดส่วนของระยะเวลาระดับสูงต่อรอบสัญญาณทั้งหมด ระยะเวลา PWM ทั้งหมดคือ 2ms หยุดที่ 1.5ms ไปข้างหน้าที่ 1.5-2ms และย้อนกลับที่ 1.5-1ms
จากรูปเราจะเห็นได้ชัดเจนว่าเมื่อ PWM อยู่ที่ 75% (1.5ms) มอเตอร์จะหยุดหมุน เมื่อ PWM อยู่ที่ 50% (1ms) มอเตอร์จะหมุนในทิศทางตรงกันข้าม และเมื่อ PWM เป็น 100% ( 2ms) มอเตอร์หยุดหมุน แน่นอนว่า ESC ไม่เพียงแต่ทำให้มอเตอร์หมุนไปข้างหน้าและถอยหลังเท่านั้น แต่ยังปรับความเร็วของมอเตอร์ผ่านรอบการทำงานของ PWM อีกด้วย เมื่อ PWM ค่อยๆ เปลี่ยนจาก 75% เป็น 50% มอเตอร์จะเดินหน้าต่อไปและเร่งความเร็วจากหยุดจนกว่าการถอยหลังจะถึงระดับสูงสุด เมื่อ PWM ค่อยๆ เปลี่ยนจาก 75% เป็น 100% มอเตอร์จะเร่งความเร็วต่อไปจากการหมุนหยุดไปข้างหน้าจนกระทั่งการหมุนไปข้างหน้าถึงค่าสูงสุด นั่นคือ PWM เป็นสัญญาณที่สามารถเปลี่ยนแปลงได้อย่างต่อเนื่อง และช่วงที่มีประสิทธิภาพคือ 50%~100%
ความถี่ของสัญญาณ PWM คือ 50hz, 100hz, 200hz หรือ 500hz เป็นต้น ยิ่งความถี่ในการควบคุมสูง ระยะเวลาที่สั้นลง ช่วงเวลาการควบคุมก็จะสั้นลง และความเร็วการตอบสนองของ ESC และมอเตอร์ก็จะยิ่งเร็วขึ้น ยิ่ง ESC และมอเตอร์ตอบสนองได้เร็วเท่าไร ในทางตรงกันข้าม ยิ่งความถี่ในการควบคุมต่ำ ระยะเวลาในการควบคุมก็จะยิ่งนานขึ้น และการตอบสนองของ ESC และมอเตอร์ก็จะยิ่งช้าลง
เกี่ยวกับคะแนน (มุมล่างขวาของหน้าร้านค้า):
★รับ 5 คะแนนสำหรับทุกๆ 1 ดอลลาร์ที่ใช้ไป
★รับ $1.00 จากการสั่งซื้อทั้งหมดของคุณสำหรับทุก ๆ 100 คะแนนที่แลก
ใช้กับคำสั่งซื้อจำนวนเท่าใดก็ได้
วิธีใช้คะแนน:
1. แลกได้ที่แผงยิ้ม
2. แลกเมื่อชำระเงิน
คำถามที่พบบ่อย:
เกี่ยวกับการปรับแต่ง
บริการปรับแต่ง ได้แก่ การปรับแต่งแรงขับ มอเตอร์ และ ESC ในทุกด้าน
หากคุณมีความต้องการปรับแต่งใด ๆ โปรดติดต่อ APISQUEEN (lynn@underwaterthruster.com)
เกี่ยวกับภาษี
ราคาสินค้าและค่าจัดส่งไม่รวมภาษี ซึ่งจะเรียกเก็บแตกต่างกันในแต่ละประเทศ ผู้ซื้อจะต้องชำระภาษีเมื่อได้รับสินค้า (เช่น นโยบายภาษีระดับภูมิภาคของสหรัฐอเมริกา: ไม่มีภาษีสำหรับการซื้อสินค้าที่มีมูลค่าสูงถึง 800 ดอลลาร์)
1. การนำเข้าระหว่างประเทศจากบางประเทศ/ภูมิภาคอาจต้องมีพิธีการศุลกากรสำหรับวัสดุเฉพาะ (หากจำเป็น เราจะจัดเตรียมใบแจ้งหนี้ Proforma ให้กับลูกค้า)
2. หากสินค้าถูกส่งคืนเนื่องจากลูกค้าไม่สามารถให้ความร่วมมือกับพิธีการศุลกากรได้ ผู้รับจะต้องรับผิดชอบค่าขนส่ง
3. เราสามารถจัดเตรียมรายการการบริโภคและใบรับรองได้ โปรดติดต่อเราหากศุลกากรต้องการ
4. หากสินค้าถูกส่งคืนเนื่องจากเหตุผลของผู้ซื้อ ผู้ซื้อจะต้องรับผิดชอบค่าจัดส่ง และค่าใช้จ่ายจะขึ้นอยู่กับการจัดส่งด่วนที่เลือก หากสินค้าเสียหายหรือไม่ถูกต้องเนื่องจากความผิดของเรา APISQUEEN จะรับผิดชอบค่าใช้จ่ายทั้งหมด
5.มูลค่าของผลิตภัณฑ์ที่เราประกาศให้กับศุลกากรคือ10%ของจำนวนการสั่งซื้อที่จ่ายจริงโดยผู้ซื้อดังนั้นผู้ซื้อโดยทั่วไปจ่ายภาษีศุลกากรน้อยมาก
เกี่ยวกับการจัดส่ง
เราสามารถจัดส่งไปเกือบทุกประเทศในโลก! อย่างไรก็ตาม มีข้อจำกัดในการนำเข้าในบางประเทศที่ต้องสังเกต
ในกรณีสต็อก: สินค้าจะถูกส่งออกภายใน 1-3 วันทำการหลังจากการชำระเงินของผู้ซื้อ
ในกรณีที่ไม่มีสต็อก: สินค้าจะถูกจัดส่งภายใน 3-20 วันทำการหลังจากการชำระเงินของผู้ซื้อ
หรืออาจมีปัญหาอื่นๆ ที่ทำให้การจัดส่งล่าช้า เช่น ข้อมูลที่อยู่ที่ต้องตรวจสอบเพิ่มเติม เป็นต้น แต่โปรดมั่นใจได้ว่าเราจะติดตามผลอย่างทันท่วงทีเพื่อให้สามารถส่งสินค้าได้รวดเร็วยิ่งขึ้น
1. โดยทั่วไปสินค้าจะถูกขนส่งทางอากาศ เราใช้วิธีการขนส่งที่แตกต่างกันตามสถานที่ตั้งของผู้ซื้อ โดยทั่วไปเราใช้ DHL, FedEx, UPS, สายเฉพาะ ฯลฯ
2. เวลาจัดส่งด่วนมาตรฐานไปยังปลายทางโดยทั่วไปคือ 3-12 วัน (ไม่มีสถานการณ์พิเศษอื่นๆ) และเวลาในการจัดส่งไปยังประเทศ/ภูมิภาคระยะไกลโดยทั่วไปคือ 10-20 วัน หากคุณมีความต้องการอื่นๆ (เช่น การจัดส่งด่วนที่กำหนด การสำแดงมูลค่าศุลกากร ฯลฯ) โปรดติดต่อเราหลังจากทำการสั่งซื้อเพื่อให้แน่ใจว่าเราสามารถตอบสนองความต้องการของคุณได้
3. APISQUEEN กำหนดอัตราค่าจัดส่งตามประเทศ/ภูมิภาคต่างๆ เพื่อลดต้นทุนการจัดซื้อของผู้ซื้อ APISQUEEN จึงริเริ่มที่จะรับผิดชอบค่าจัดส่ง 50% สำหรับผู้ซื้อ
4. ค่าธรรมเนียมการขนส่งจะคิดตามน้ำหนักของสินค้าและจะชำระเมื่อมีการสั่งซื้อ ค่าขนส่งที่แสดงในการชำระเงินเป็นผลมาจาก APISQUEEN คิดเป็น 50%
5. คุณสามารถประมาณค่าจัดส่งได้ดังนี้: เลือกสินค้าที่คุณต้องการซื้อ → หยิบลงตะกร้า → กรอกรหัสไปรษณีย์ของที่อยู่ในการจัดส่ง → เลือกวิธีการจัดส่ง → จากนั้นคุณจะได้รับค่าจัดส่งโดยประมาณ
6. หากคุณต้องการสินค้าเร่งด่วน โปรดติดต่อเราก่อนทำการสั่งซื้อเพื่อให้แน่ใจว่าเราสามารถตอบสนองความต้องการด้านเวลาของคุณได้
เกี่ยวกับหลังการขาย
1. สามารถยกเลิกคำสั่งซื้อก่อนส่งสินค้าเพื่อรับเงินคืนเต็มจำนวน (รวมค่าขนส่งแล้ว) หลังจากที่สินค้าถูกจัดส่งแล้ว หากผู้ซื้อขอคืนเงินด้วยเหตุผลของตนเอง (เช่น เขาไม่ต้องการมัน ซื้อสินค้าผิด ฯลฯ) ผู้ซื้อจะต้องรับผิดชอบค่าใช้จ่ายในการจัดส่งด่วนและคืนสินค้า กับเรา เราจะได้รับสินค้าที่ส่งคืนหลังจากนั้นจะคืนเงินให้กับผู้ซื้อ
2. หากคุณพบว่าพัสดุของคุณเสียหายระหว่างการขนส่ง โปรดติดต่อเรา (Lynn@underwaterthruster.com) ภายใน 5 วันหลังจากได้รับสินค้า และแจ้งรูปถ่ายหรือวิดีโอของสินค้า เราจะตอบกลับภายใน 1-3 วัน เราจะจัดการให้ ให้กับคุณภายในวันทำการตามสถานการณ์จริงตามความพึงพอใจของคุณ
3. หากคุณต้องการเปลี่ยนสินค้าที่ซื้อหลังจากได้รับสินค้าแล้ว คุณจะต้องส่งสินค้าไปที่
APISQUEEN; หากสินค้ามีปัญหาด้านคุณภาพภายใน 6 เดือนหลังจากซื้อสินค้าและยืนยันการรับสินค้า เราจะให้บริการหลังการขายฟรี และส่งอุปกรณ์เสริมหรือผลิตภัณฑ์ใหม่ไปให้ผู้ซื้อทางไปรษณีย์ฟรี (ผู้ซื้อเพียงแบกรับ ค่าขนส่งด่วน เพียงเท่านี้ APISQUEEN จะไม่ช่วยให้ผู้ซื้อรับผิดชอบค่าจัดส่ง 50% อีกต่อไป และผู้ซื้อจะต้องรับผิดชอบค่าจัดส่ง 100%)
APISQUEEN ปฏิเสธการบริการหลังการขายในกรณีต่อไปนี้:
1. ความล้มเหลวและความเสียหายที่ไม่ได้เกิดจากปัญหาคุณภาพของผลิตภัณฑ์
2. ความเสียหายที่เกิดจากการดัดแปลงวงจรหรือการจับคู่ที่ไม่เหมาะสม
3. ความเสียหายที่เกิดจากการดัดแปลงหรือถอดชิ้นส่วนโดยไม่ได้รับอนุญาต
4. ความเสียหายที่เกิดจากการติดตั้งหรือการใช้งานที่ไม่เหมาะสม
5. การไม่ทำความสะอาดด้วยน้ำจืดทันเวลาหลังการใช้งานในน้ำทะเลจะทำให้อายุการใช้งานของผลิตภัณฑ์สั้นลง